Ebarisbot: Assistive Transport Robot
A robust mobile robot designed to transport 15kg payloads for users with lumbar limitations, featuring Bluetooth app control and structural steel chassis.
Ebarisbot: Assistive Transport Robot
Overview
A robust mobile robot designed to transport 15kg payloads for users with lumbar limitations, featuring Bluetooth app control and structural steel chassis.
Overview
Ebarisbot is an engineering solution developed to address mobility and load-carrying challenges for elderly users, specifically targeting those suffering from lumbar osteomuscular issues (lumbar back pain). The project converts this health necessity into a functional mechatronic system capable of transporting groceries and household items without requiring physical exertion from the user.
Designed by Group G3A at Universidad Nacional de Colombia, the robot meets strict ergonomic requirements, ensuring load accessibility at specific heights to prevent user bending or reaching.
Key Features
- High Load Capacity: Capable of transporting up to 15 kg of payload.
- Ergonomic Design: Fixed payload height of 86.5 cm, complying with NTC 5693-1 ergonomics standards for accessible reach (approx. 0.25m above the knuckle).
- Mobile App Control: Custom Android application developed in App Inventor, communicating via Bluetooth (HC-06).
- Obstacle Avoidance: Integrated ultrasonic sensor system to detect collisions and stop automatically.
- Robust Autonomy: Powered by a 12V 5Ah Lead-Acid battery offering ~2 hours of continuous operation.
Technical Specifications
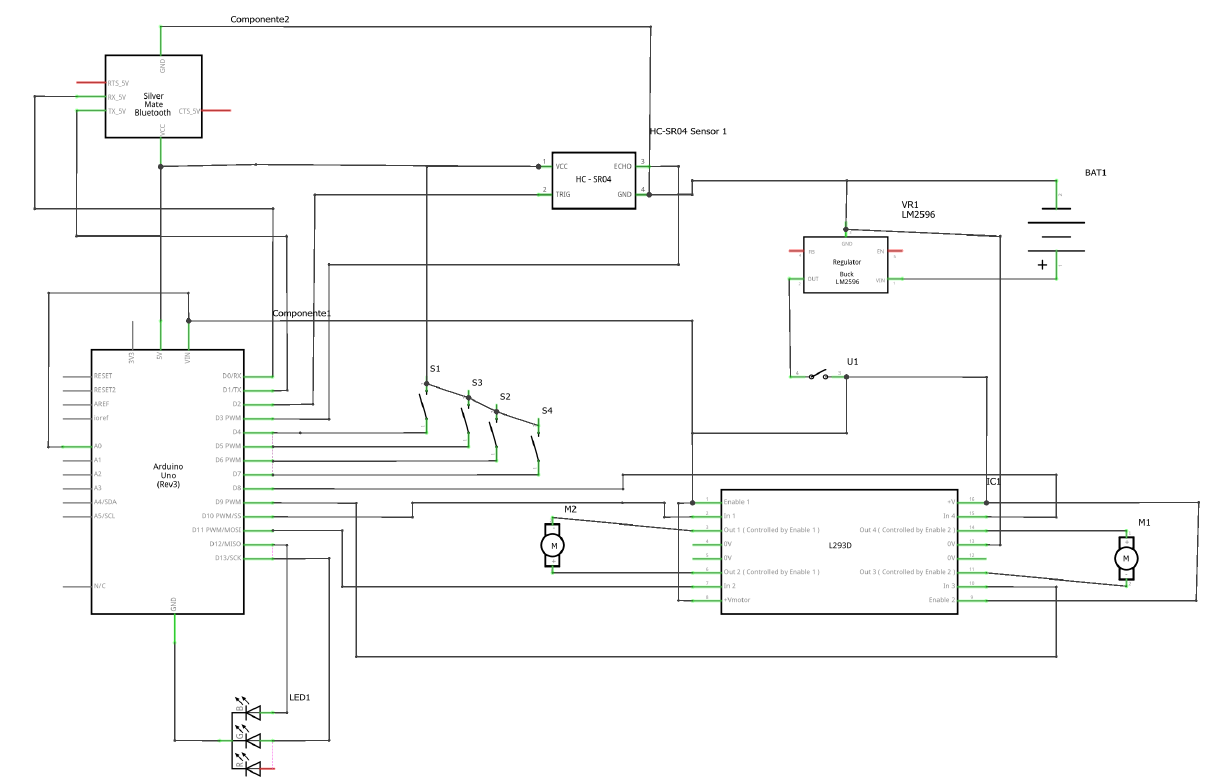
Electronics System
- Microcontroller: Arduino UNO (ATmega328P).
- Actuation: DC Gearmotors driven by an L298N Dual H-Bridge driver.
- Sensors: HC-SR04 Ultrasonic sensor for frontal distance measurement (0-4m range).
- Connectivity: HC-06 Bluetooth module for UART communication with smartphone.
- Power:
- 12V 5Ah Lead-Acid Battery (selected for cost/performance ratio).
- LM2596 DC-DC Buck converter (12V to 5V) for logic levels.
- 2A Fuse protection system.
Mechanical Design
- Chassis Structure: Manufactured using steel angle profiles, selected over aluminum for cost-effectiveness and durability.
- Top Speed: 0.48 m/s (designed limit for safety: 1 m/s).
- Simulation: Extensive Finite Element Analysis (FEA) performed in Fusion 360.
- Fabrication: Combination of welded steel structure and 3D printed (PLA) components for enclosures and aesthetic covers.
Control Logic & Software
The robot operates on a loop cycle processing inputs from two sources:
- Pilot Input: Commands received via Bluetooth (Forward, Backward, Left, Right, Stop).
- Safety Override: The ultrasonic sensor constantly polls distance. If
distance < threshold, the robot ignores forward commands to prevent collision.
Engineering Analysis: Torque Profile
During the design phase, it was critical to simulate the torque requirements of the drive shaft to ensure the selected motors could handle the inertia of a 15kg load accelerating. The interactive chart (right panel) visualizes the simulated torque profile over time during a standard movement cycle.
Project Result
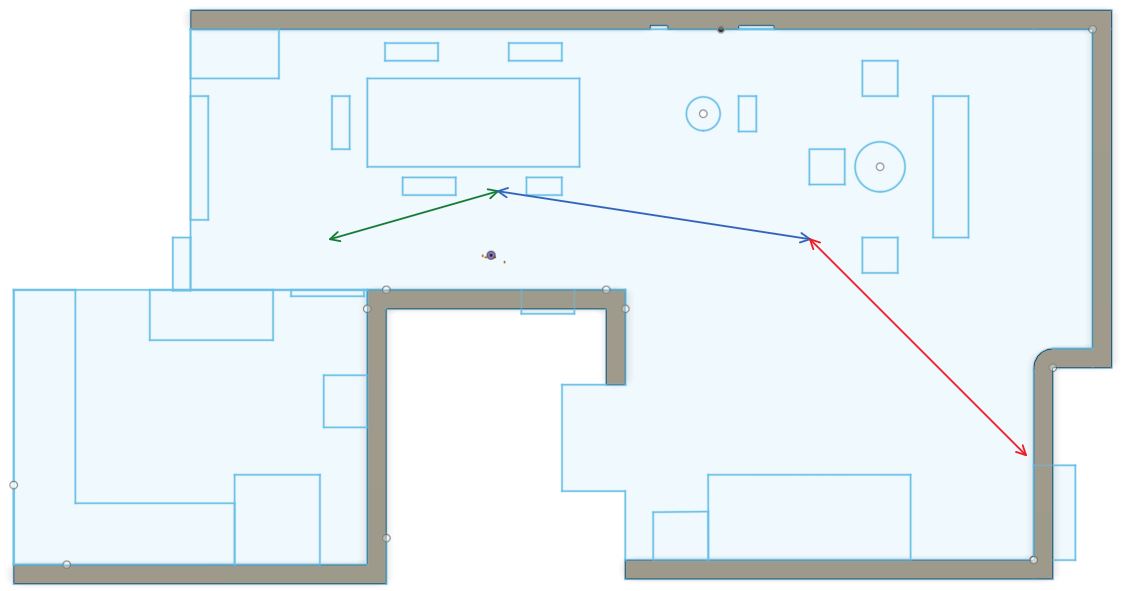
The final prototype successfully met the “Retomake:able” challenge requirements. It demonstrated the ability to carry the full 15kg load over a 12m course, crossing 3mm floor gaps (simulating tiles) without instability. Not only was the functionality achieved, but the user experience was prioritized through a simple, high-contrast mobile interface suitable for the target demographic.
Resources & Credits
- Authors: Alejandro Ojeda Olarte, Paula Sofía Medina Díaz, María Alejandra Rojas Huertas, Daniel Esteban Bohórquez Cifuentes, Carlos Andrés Arévalo Rojas.
- Course: Applied Engineering Project (Proyecto Aplicado de Ingeniería).
- Institution: Universidad Nacional de Colombia, 2022.

Ebarisbot functional prototype in operation

Target user scenario rendering

Final prototype visualization

Low-fidelity cardboard prototype for ergonomic validation
Velocity Diagram Analysis

Static load testing (15kg)
Electronic System Schematic
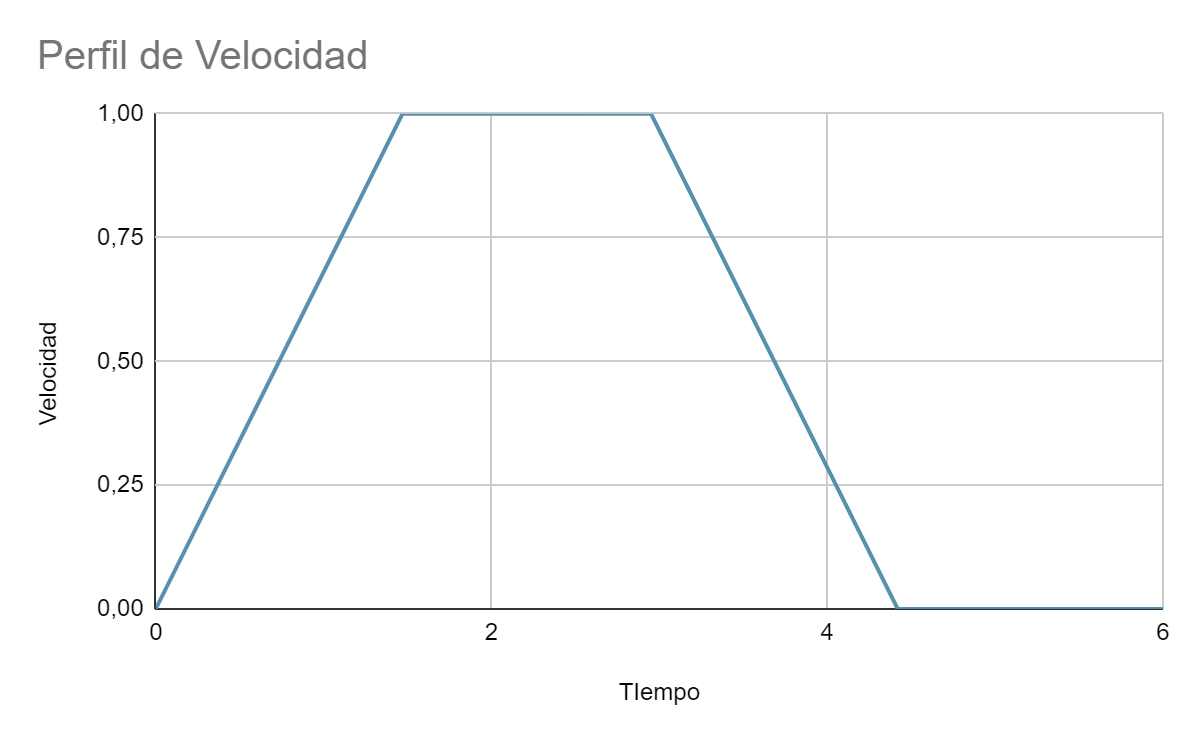
Initial Velocity Profile
Performance Analysis
Schematics