Hykabaï: Autonomous Mobile Robot
An advanced autonomous mobile robot platform equipped with ROS integration, vision systems, and real-time control for autonomous navigation research and indoor robotics applications.
Hykabaï: Autonomous Mobile Robot
Overview
An advanced autonomous mobile robot platform equipped with ROS integration, vision systems, and real-time control for autonomous navigation research and indoor robotics applications.
Project Overview
Hykabaï is an advanced autonomous mobile robot platform engineered for research and autonomous navigation applications. The system integrates real-time motion control, ROS (Robot Operating System), computer vision, and sophisticated sensor fusion algorithms to create a versatile robotic platform capable of autonomous navigation and environmental perception.
Key Innovation Areas
- Autonomous Navigation: SLAM-based localization and simultaneous mapping
- Real-time Control: 100+ Hz control loop with feedback compensation
- Modular Architecture: Plug-and-play hardware and software modules
- ROS Integration: Full Robot Operating System ecosystem compatibility
- Computer Vision: Integration with RGB-D cameras and LIDAR sensors
- Sensor Fusion: Multi-sensor fusion for robust localization and mapping
System Architecture
Hardware Platform
Primary Computing: BeagleBone Blue (AM5728 Dual-Core 1.5GHz)
- Onboard Features:
- Dual H-bridge motor drivers
- 8× servo PWM outputs
- Multiple sensor interfaces
- Built-in wireless (WiFi/Bluetooth)
- Real-time processing capability
Secondary Compute: Raspberry Pi 3 (optional)
- Handles computationally intensive vision tasks
- ROS secondary node for distributed processing
- Enhanced storage and development flexibility
Mobility System
Drive Configuration: Differential drive with dual reduction gearmotors
| Parameter | Specification |
|---|---|
| Motor Type | 1:50 Metal Gearmotors (20D) |
| Rated Voltage | 6-12 VDC |
| Stall Torque | 1.5 Nm @ 12V |
| No-load Speed | 300 RPM @ 12V |
| Encoder Resolution | Quadrature 64 CPR |
| Maximum Speed (robot) | ~0.5 m/s |
| Turning Radius | ±0.2 m (in-place capable) |
Wheel Assembly
- Type: Omnidirectional wheels with caster balance wheel
- Diameter: 70mm (drive wheels), 25mm (caster)
- Traction: Rubber tread for indoor/outdoor operation
- Ground Clearance: 30mm (obstacle-capable)
Control Electronics
Motor Control Subsystem
Encoder Input (64 CPR, Quadrature)
↓
Speed Estimation (Low-Pass Filter)
↓
PID Controller (Kp=?, Ki=?, Kd=?)
↓
PWM Signal (16-bit, 1 kHz)
↓
H-Bridge Driver (Polulu DRV8835)
↓
Brushed DC Motor (6-12V)
Sensor Integration
Encoders: Quadrature shaft encoders for odometry
- Resolution: 64 counts per revolution
- Error Analysis: < 2% cumulative drift over 100m
- Update Rate: Continuous (event-driven)
Optional Sensors:
- LIDAR: 2D scanning for obstacle detection (URG-04LX compatible)
- RGB-D Camera: Depth-based object recognition
- IMU: Accelerometer/Gyroscope for tilt compensation
- Battery Monitor: Voltage/Current sensing for power management
Software Architecture
ROS Ecosystem Integration
Core Nodes:
motor_driver: Hardware abstraction for motor controlodometry: Position estimation from encoder feedbacknavigation: Autonomous path planning and obstacle avoidancevision: Image processing and object detectionstate_machine: High-level behavior controller
Control Stack
Low-Level: Real-time control loop running on BeagleBone Blue
- Motor PWM commands (update rate: 100 Hz)
- Encoder reading and processing
- Safety watchdog monitoring
Mid-Level: ROS coordination layer
- Sensor fusion and filtering
- Trajectory computation
- Communication management
High-Level: Autonomous behavior framework
- Task planning and sequencing
- Decision-making algorithms
- Human-robot interaction
Motion Control Analysis
Speed Dynamics
The platform exhibits first-order speed response characteristics:
\[\frac{v(t)}{v_{ref}} = 1 - e^{-t/\tau}\]Where time constant τ ≈ 0.2 seconds, enabling rapid acceleration changes.
Trajectory Execution
Demonstrated capabilities:
- Square Pattern: 1m × 1m with < 5cm positioning error
- Curved Path: Smooth bezier curve following with adaptive speed
- Rotation: Full 360° in-place rotation with < 10° heading error
- Multi-segment: Complex paths combining translation and rotation
Performance Metrics
| Metric | Value |
|---|---|
| Velocity Range | 0.05 - 0.5 m/s |
| Acceleration | 0.3 m/s² (nominal) |
| Positioning Accuracy | ±5 cm |
| Heading Accuracy | ±10° |
| Response Time | ~100 ms |
| Battery Life | 2-4 hours (typical) |
Autonomous Features
Navigation Algorithms
SLAM Implementation:
- Graph-based optimization (pose graph structure)
- Loop closure detection for map consistency
- Incremental mapping with bounded computation time
Path Planning:
- Dijkstra’s algorithm for global routes
- Dynamic Window Approach (DWA) for local collision avoidance
- Velocity obstacle (VO) computation for multi-robot scenarios
Computer Vision
Object Recognition:
- Trained YOLOv3/v4 models for common warehouse objects
- Transfer learning from COCO dataset
- Real-time inference on Raspberry Pi GPU acceleration
Pose Estimation:
- Marker-based AprilTag detection
- Feature-based visual odometry (ORB-SLAM compatible)
- Sensor fusion with encoder odometry
Experimental Results
Navigation Accuracy
Testing in structured indoor environment (5m × 5m):
- Systematic Error: < 3% of distance traveled
- Stochastic Error: < 2cm standard deviation
- Loop Closure: < 10cm position error after 50m circuit
Power Consumption
Battery capacity: 5 Ah @ 12V (60 Wh nominal)
| Operation | Current (A) | Duration |
|---|---|---|
| Idle/Standby | 0.2 A | Continuous |
| Navigation | 2-3 A | 2-3 hours |
| Active Sensing | 2.5-4 A | 1.5-2.5 hours |
Software Development Kit
ROS Packages and Architecture
The Hykabaï platform is built on standard ROS packages for navigation and perception:
Navigation Stack:
move_base: Navigation framework for autonomous movementgmapping: SLAM implementation using Rao-Blackwellized particle filtersamcl: Adaptive Monte Carlo localization for map-based navigationdwa_local_planner: Dynamic Window Approach for local collision avoidance
Vision Processing:
image_transport: Efficient image streaming across ROS networkopencv_ros: Computer vision pipeline integrationdepth_image_proc: Depth image processing from RGB-D sensors
Control and Monitoring:
- Custom motor control nodes running on BeagleBone Blue
- Battery monitoring and power management nodes
- Sensor aggregation and odometry computation
Key Integration Points
The platform integrates with standard ROS tools for development:
- ROS Master: Centralized communication hub for all nodes
- TF (Transform) Framework: Multi-dimensional transformation support
- rViz: Real-time visualization of sensor data and navigation state
- ROS Bag: Recording and playback of sensor data for offline analysis
Design Evolution
The Hykabaï platform represents the culmination of multiple design iterations:
v1-v2: Conceptual feasibility studies with simple differential drive v3-v5: Hardware integration and motor control refinement v6-v10: ROS ecosystem integration and basic autonomous navigation v11-v14: Computer vision pipeline development and SLAM implementation v14+: Advanced features including multi-task planning and machine learning
Current version v28 (CAD) and v3 (Physical) represent production-ready configurations.
Applications
Research Domains
- Autonomous robotics and navigation algorithms
- SLAM and sensor fusion techniques
- Computer vision and object detection
- Robot learning and adaptive control
- Human-robot interaction and social robotics
- Multi-robot coordination and swarms
Practical Applications
- Indoor autonomous navigation research
- Mobile platform sensor integration testing
- Autonomous mapping and exploration
- Sensor data collection and analysis
- Mobile robot algorithm development and validation
Future Enhancements
Planned Improvements:
- Enhanced sensor suite (multimodal LIDAR, thermal imaging)
- Improved SLAM algorithms with loop closure optimization
- Advanced computer vision for dynamic object tracking
- Deep learning-based end-to-end navigation
- Reinforcement learning for task optimization
- Extended battery life with hybrid power systems
- ROS 2.0 migration for improved performance
- Distributed computing with additional compute nodes
- Advanced obstacle avoidance in crowded environments
- Real-time performance monitoring and self-diagnostics
Technical Specifications Summary
| Category | Specification |
|---|---|
| Platform | Differential-drive autonomous mobile robot |
| Compute | BeagleBone Blue + optional Raspberry Pi |
| ROS Version | ROS Melodic/Noetic compatible |
| Drive Motors | 1:50 reduction gearmotors (20D) |
| Maximum Speed | 0.5 m/s |
| Positioning Error | ±5 cm |
| Sensor Suite | Encoders, optional LIDAR, optional RGB-D camera |
| Communication | WiFi, Bluetooth, Ethernet |
| Power Source | 5 Ah LiPo battery (12V nominal) |
| Operating Time | 2-4 hours (motion dependent) |
| Dimensions | 300 × 250 × 400 mm |
| Weight | 3-4 kg |
| Development | Python, C++, ROS |
Resources
{kind=link}

Square trajectory execution animation
Hexagonal trajectory execution animation
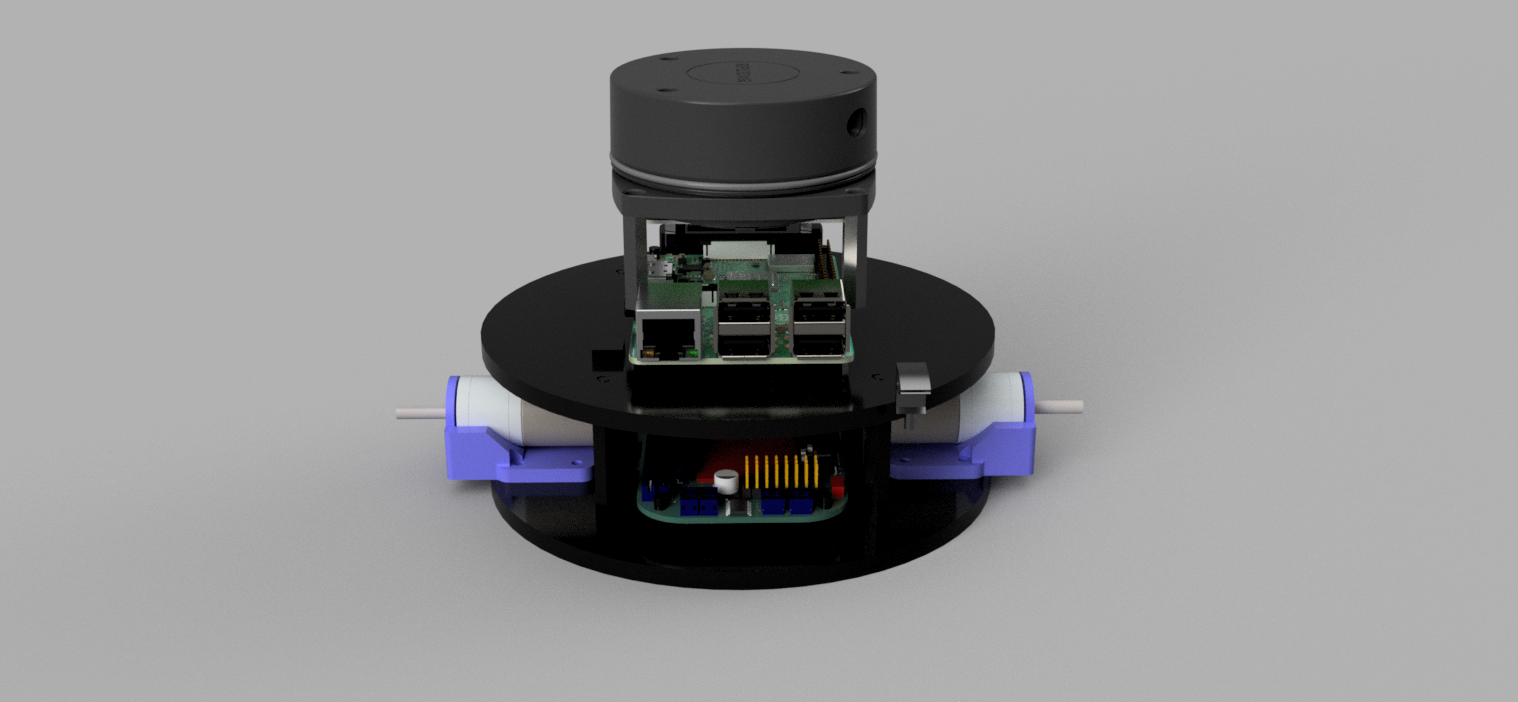
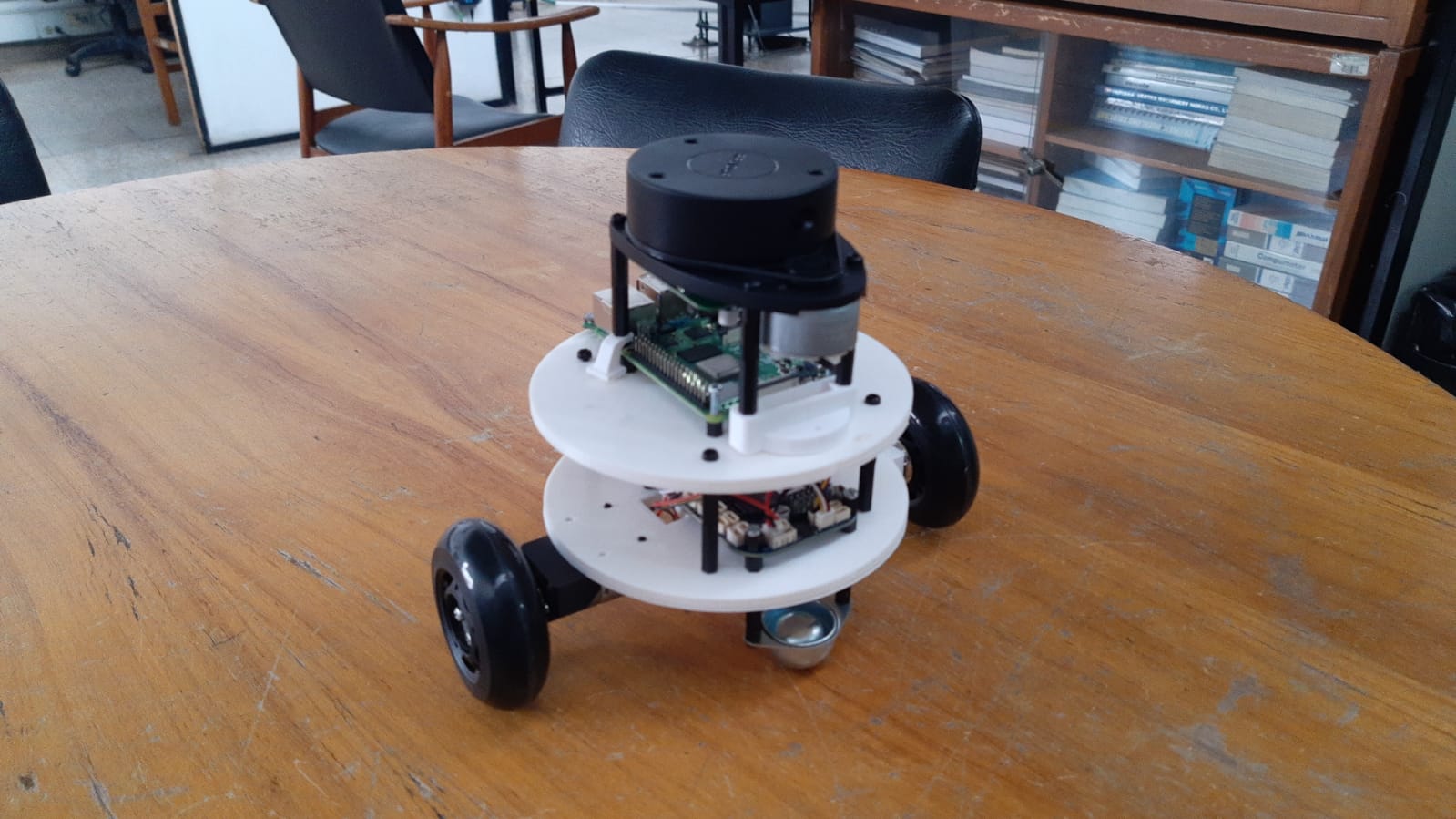
Hykabaï robot CAD rendering - latest design iteration
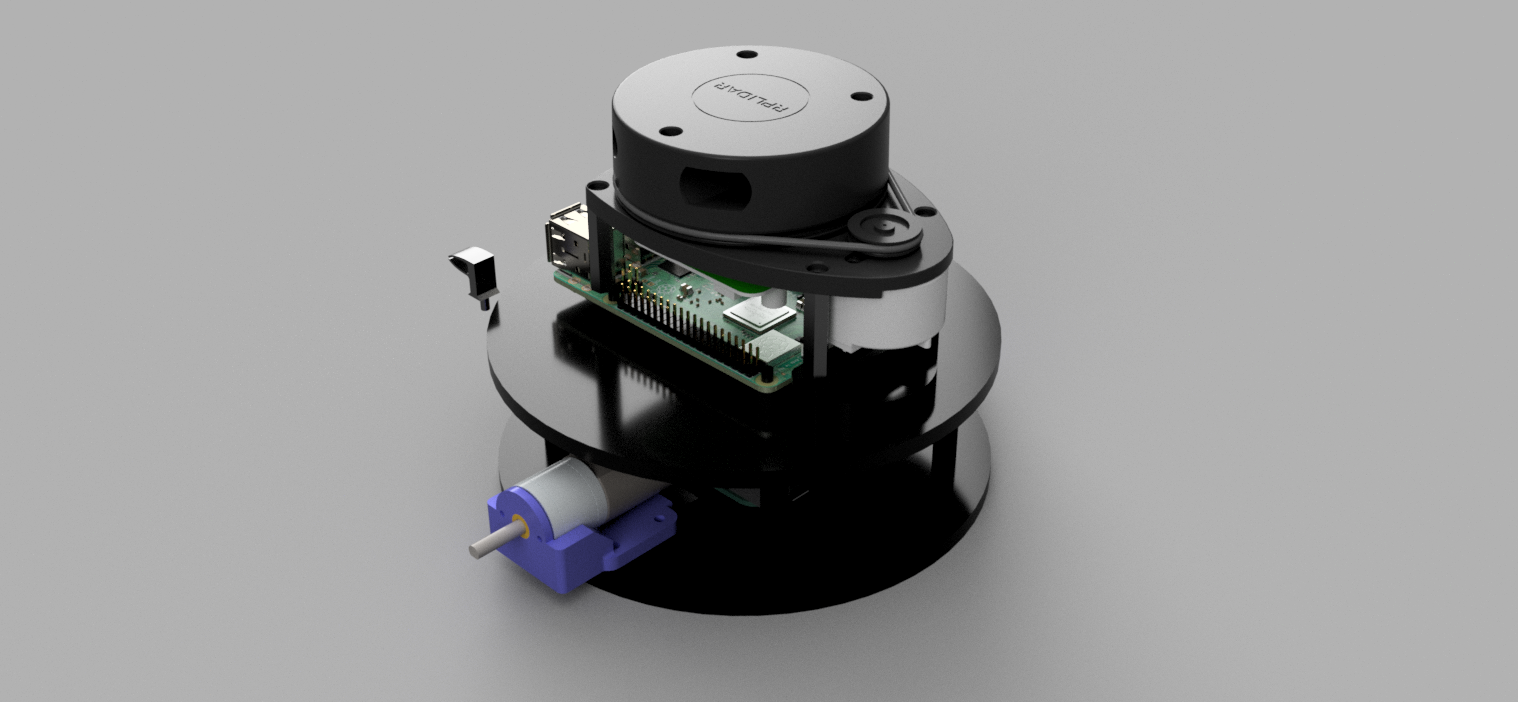
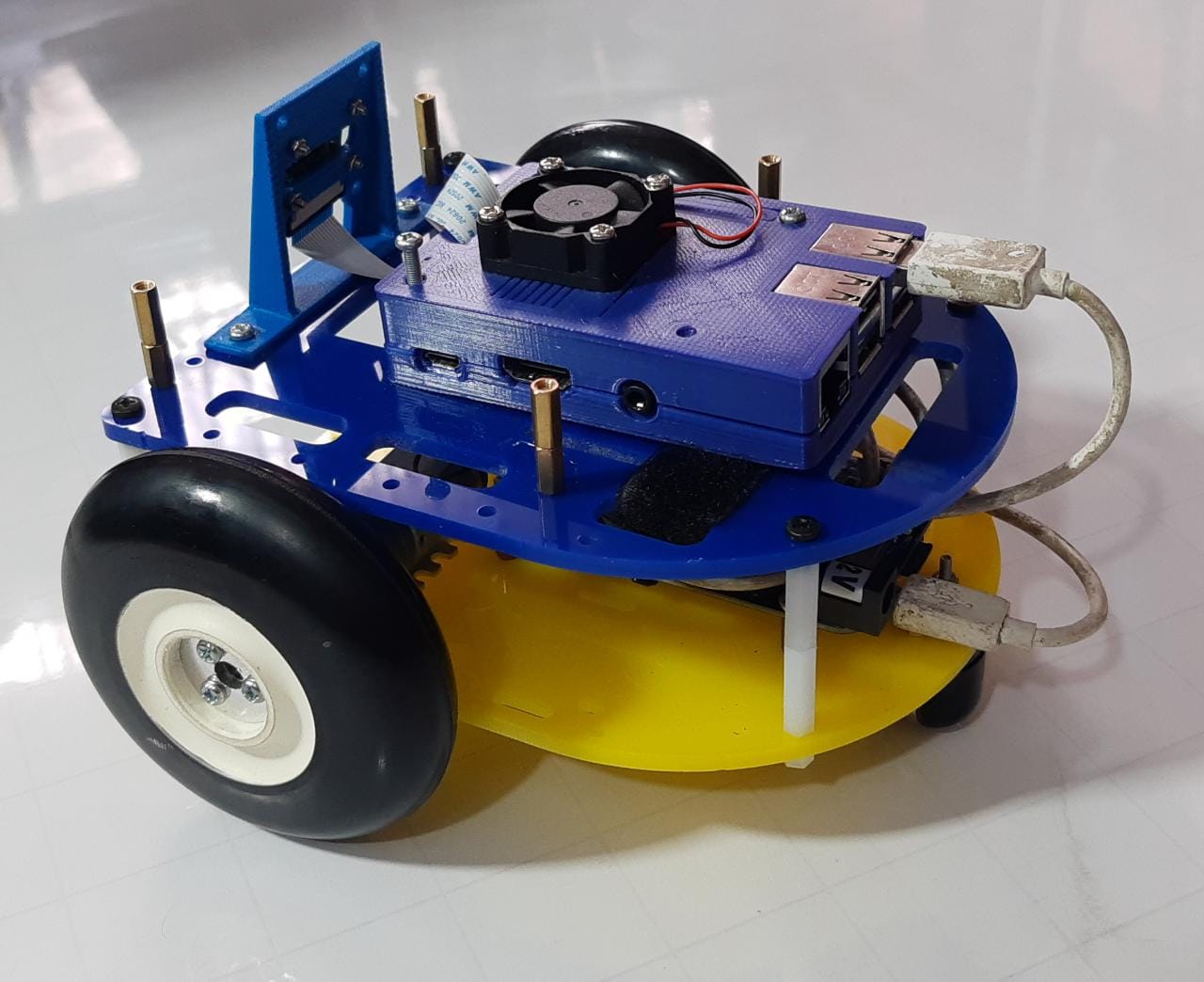
Robot platform overview
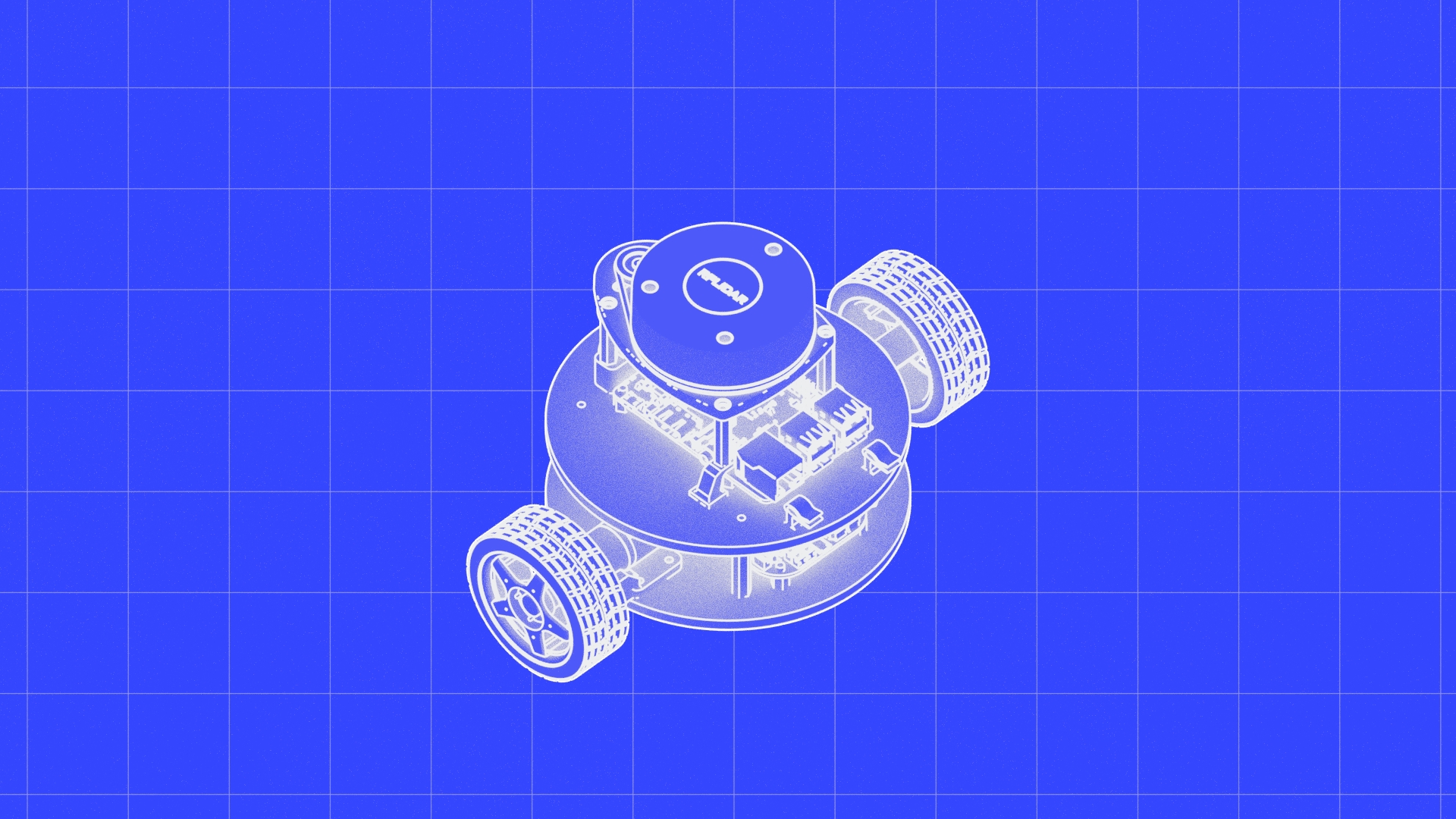
3D model visualization of chassis assembly
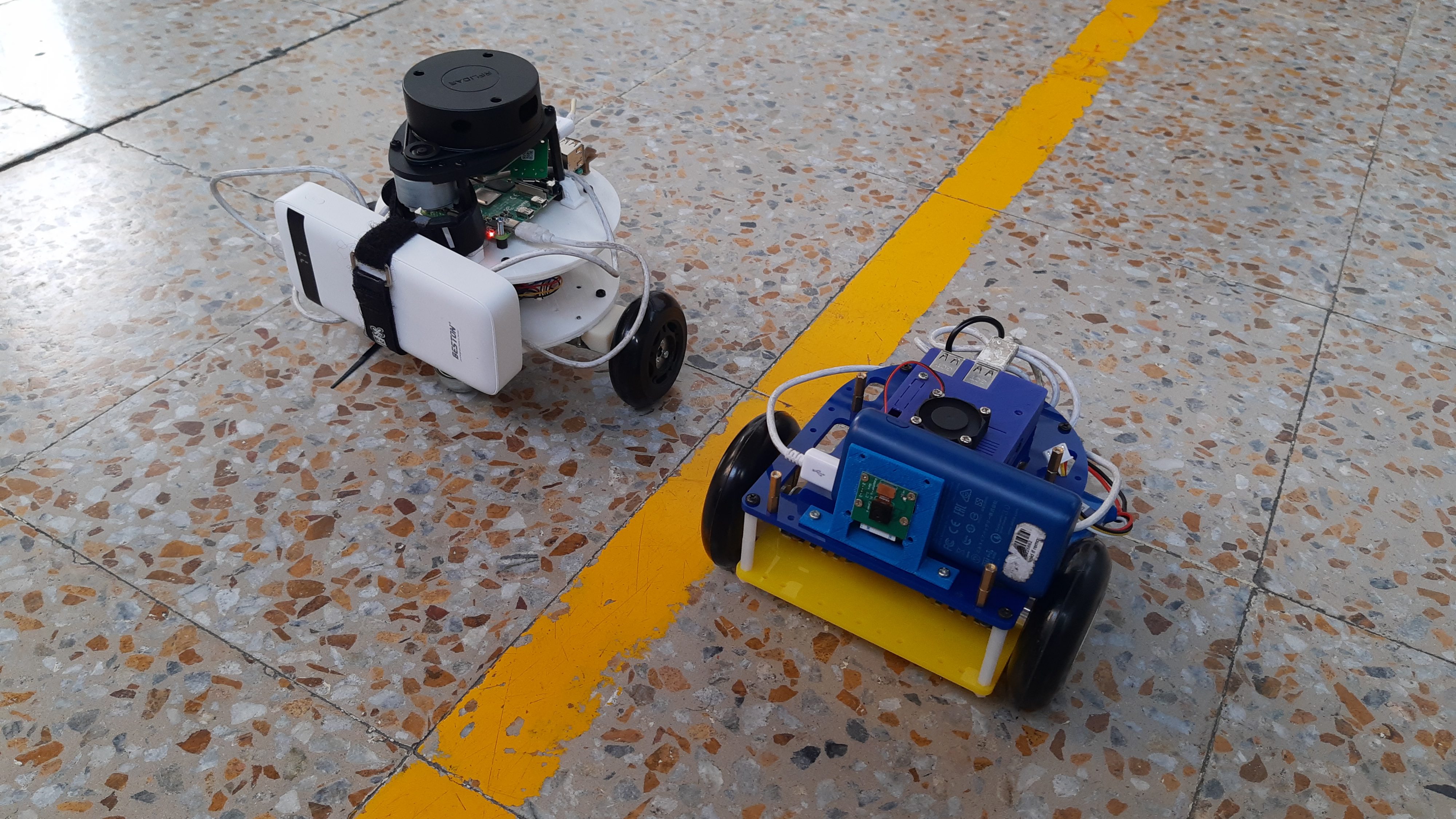
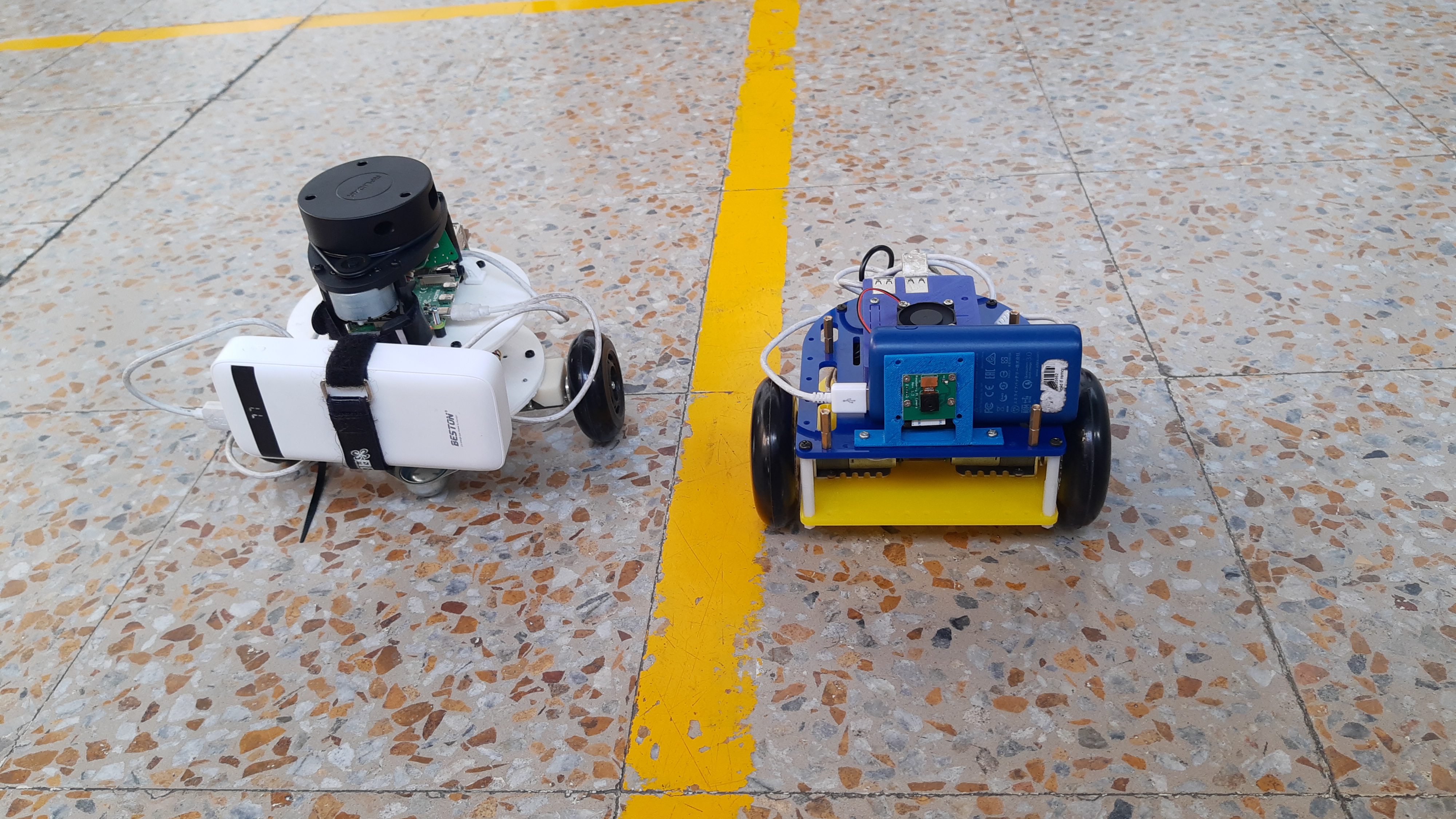
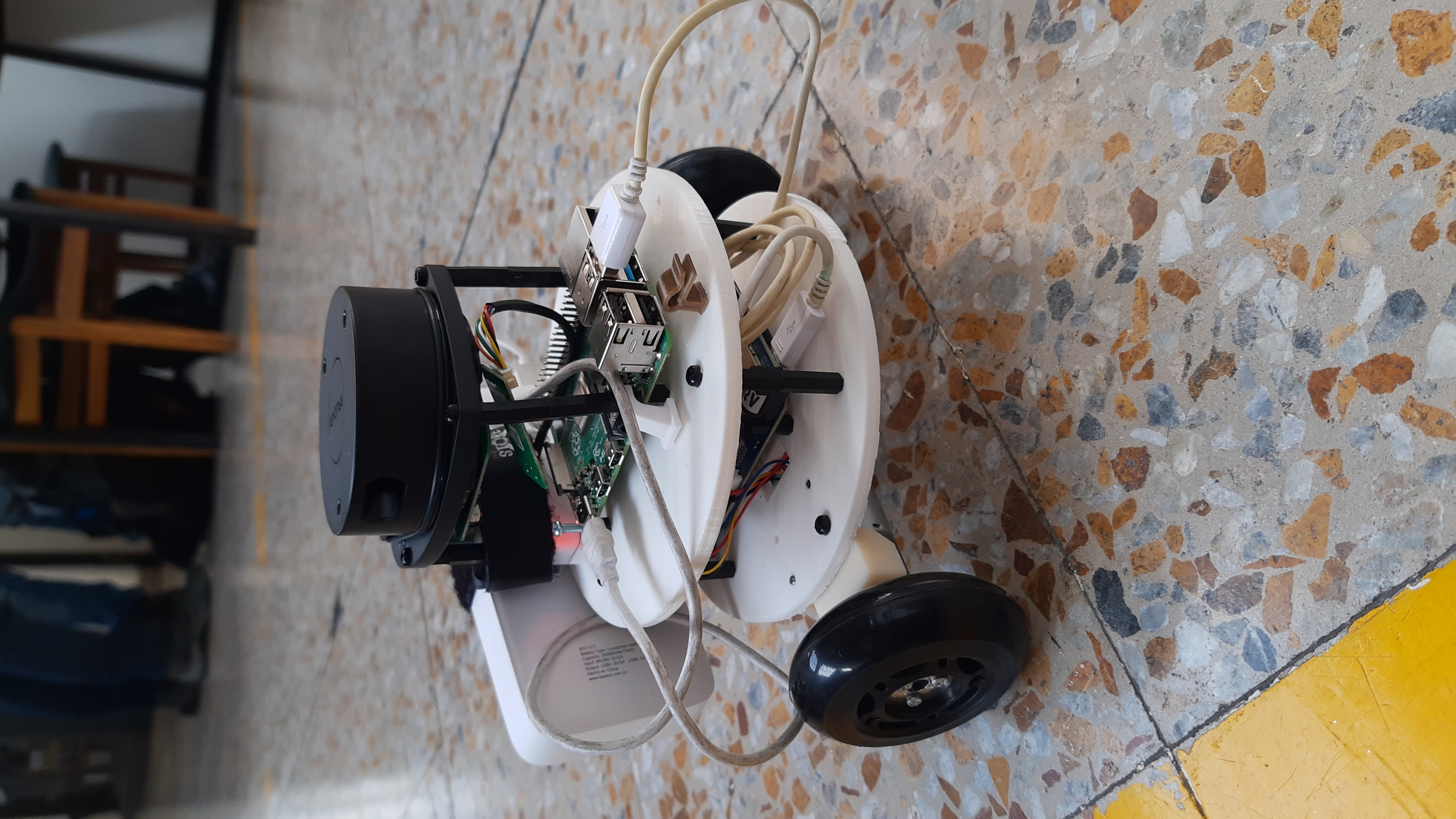
Physical prototype in laboratory environment
Sensor integration and mounting detail

Prototype testing and evaluation

Motion test and navigation

Autonomous navigation demonstration
Platform capabilities in environment
.jpg)
Action shot during autonomous operation
Navigation in unstructured environment
Real-world deployment scenario
.jpeg)
Robot platform demonstration
Motion trajectory execution animation
Encoder signal sequence visualization
.gif)
3D model animation of robot movement
Robot navigation and motion demonstration
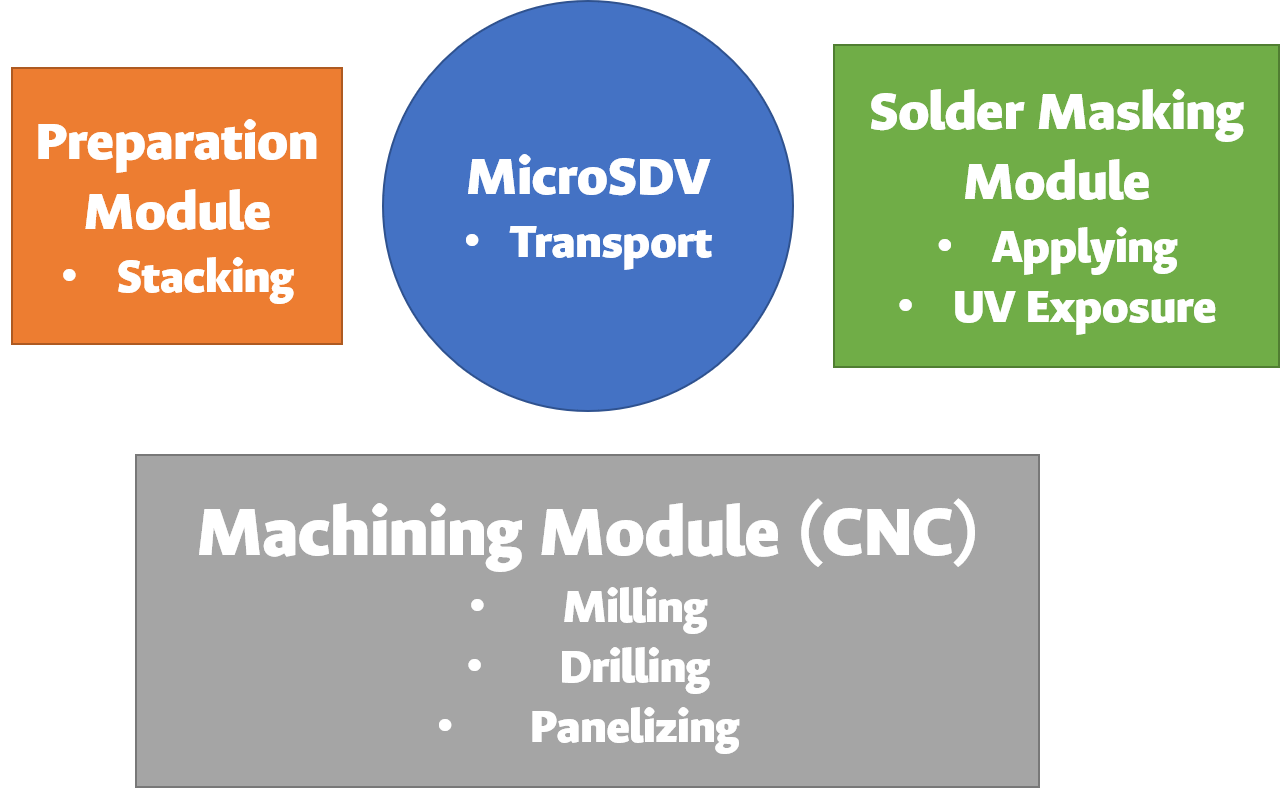
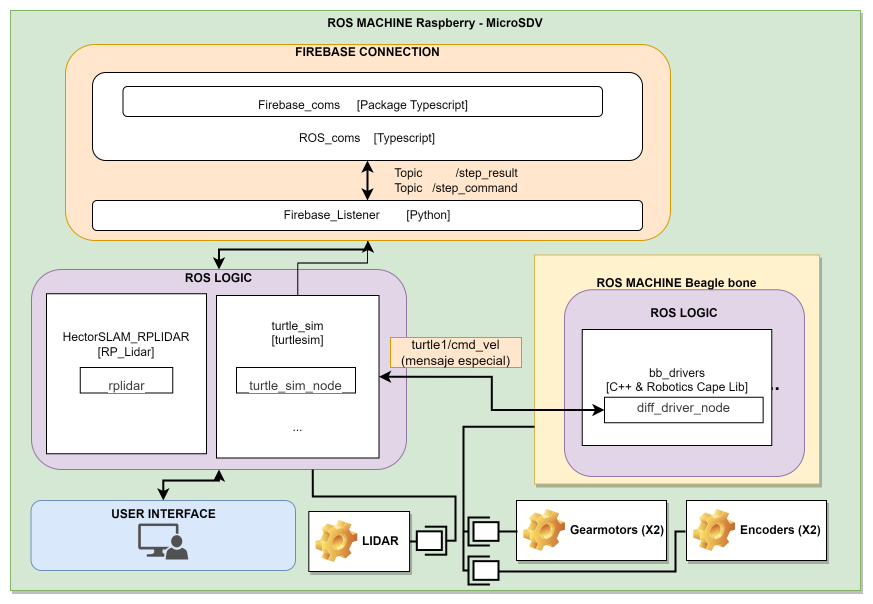
System Module Architecture
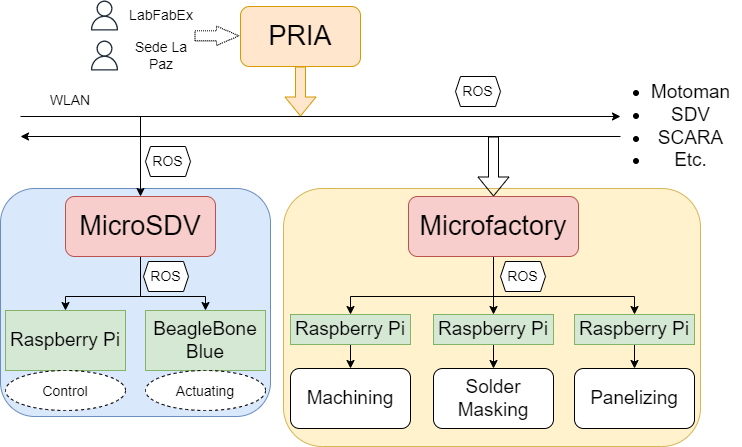
ROS Network Topology
Kinematic Parameter Table
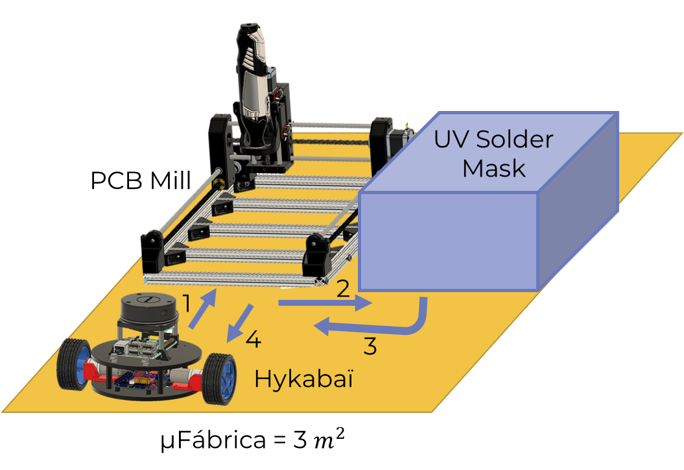
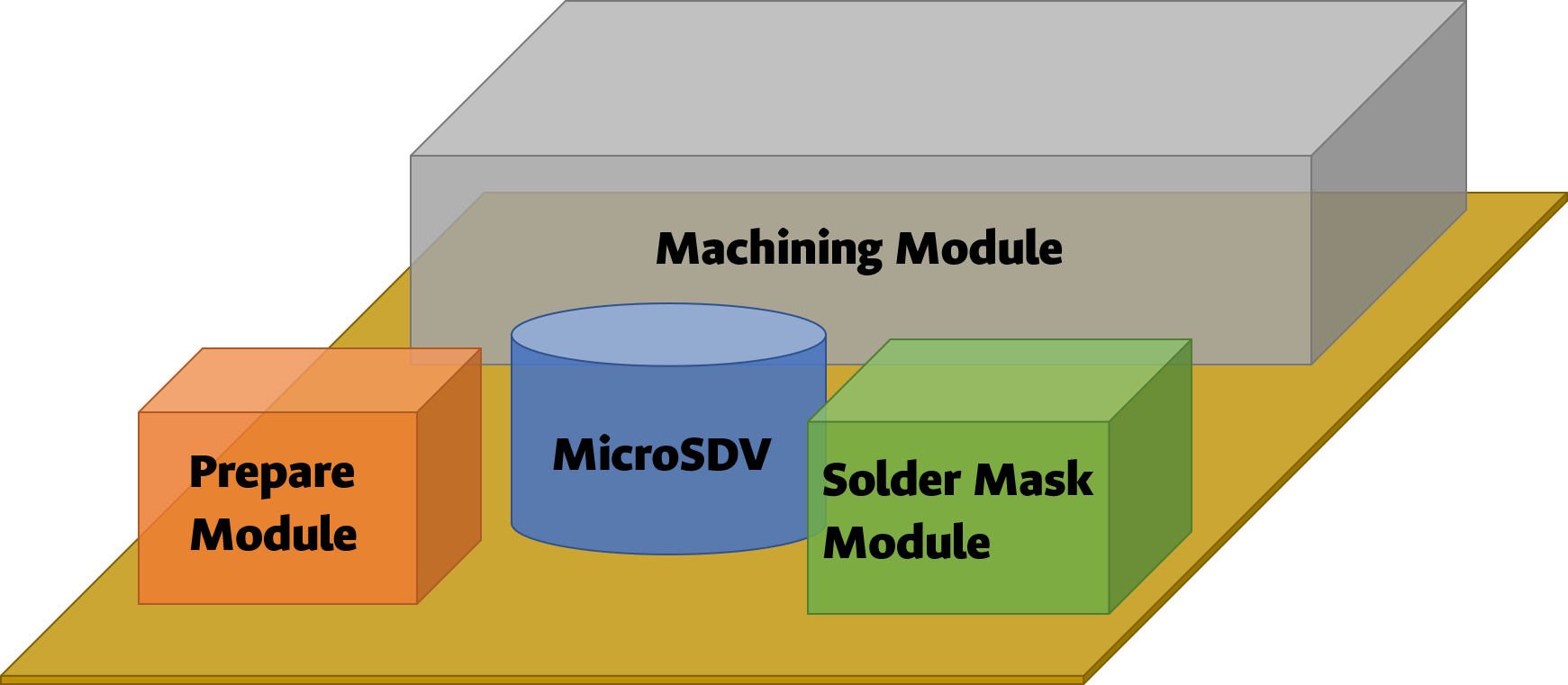
3D Workspace Visualization
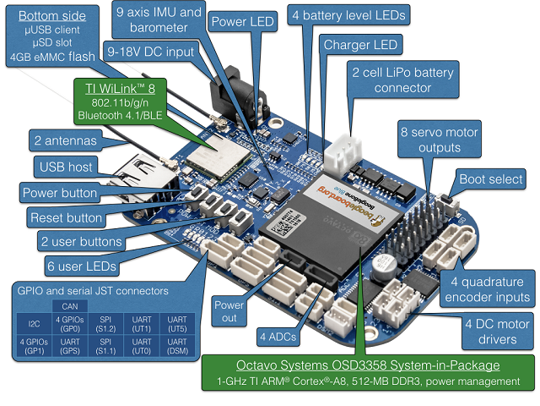
BeagleBone Blue Component Breakdown

Raspberry Pi 3 Supplement Module
Selected Encoder Specifications
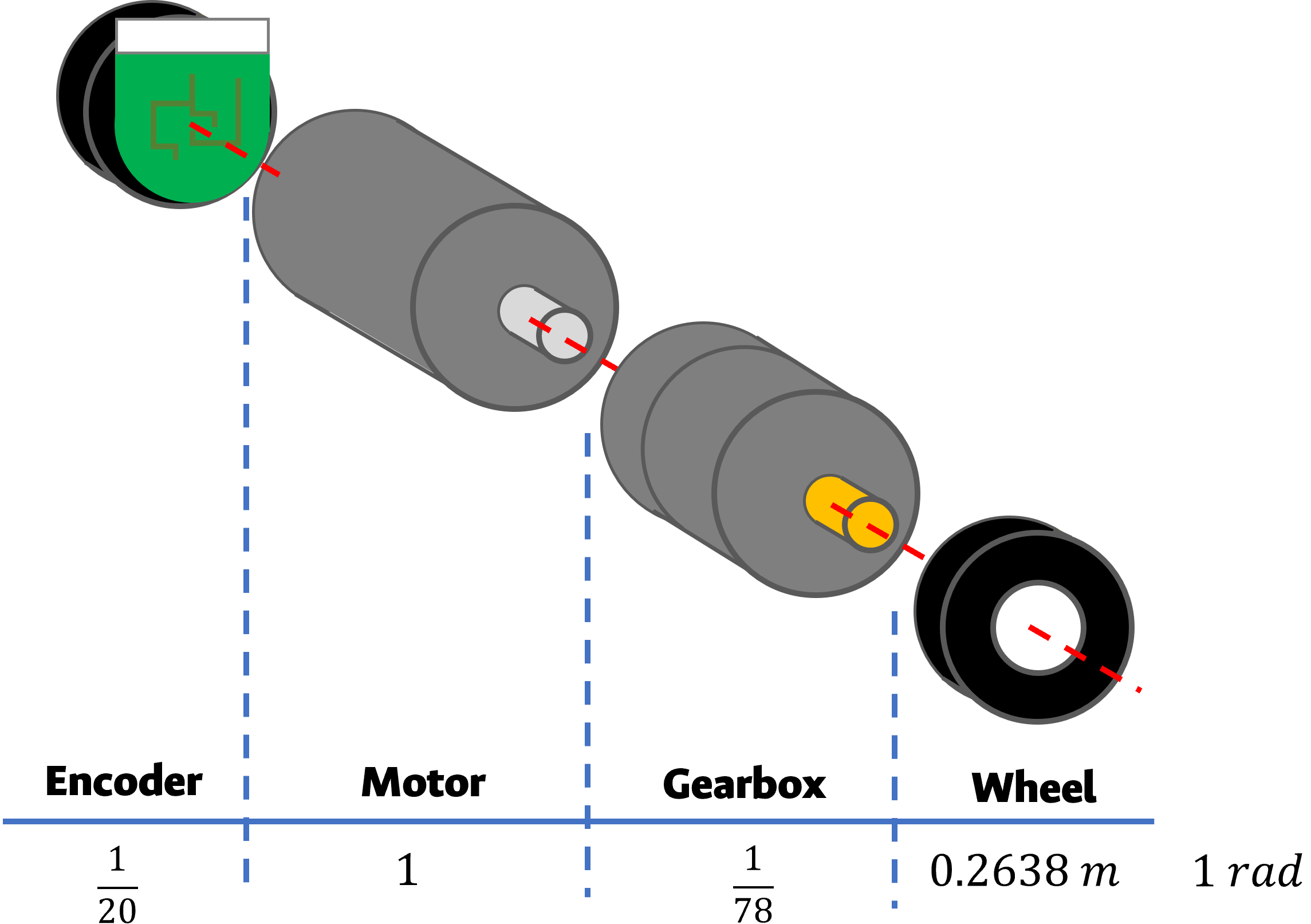
Motor-Encoder Integration Detail
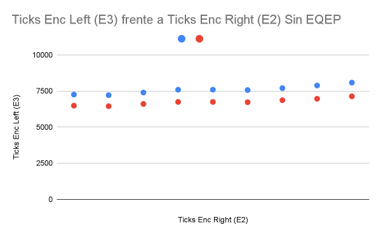
Encoder Error Analysis Graph
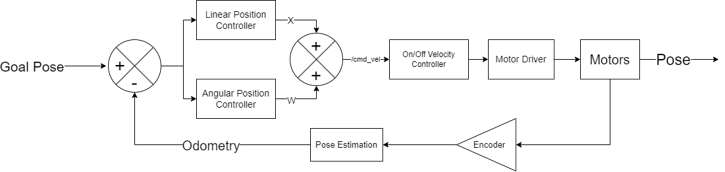
Speed Control Block Diagram
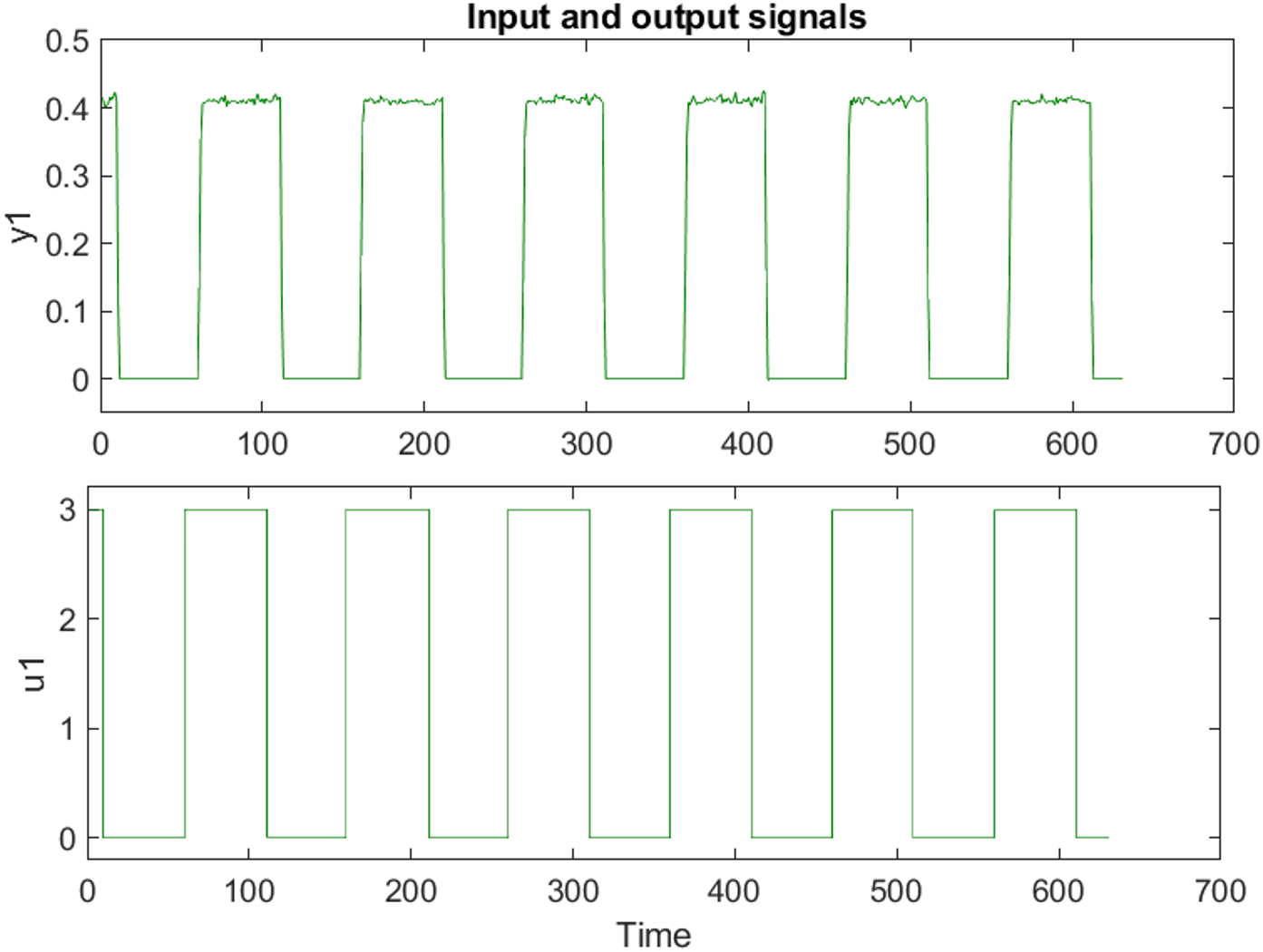
Angular Speed Plant Characteristics
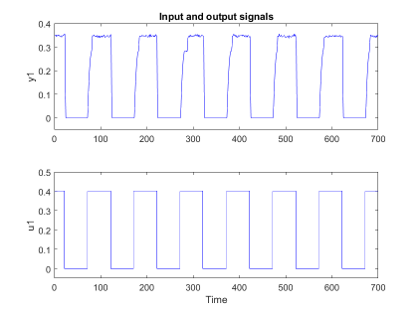
Linear Speed Plant Response
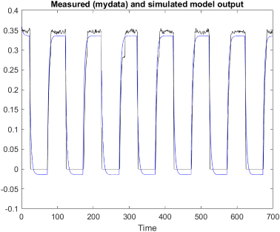
Low-Pass Filter Test Results
ROS State Machine Diagram

Project Mind Map and Structure

Algorithm and Software Function Diagram
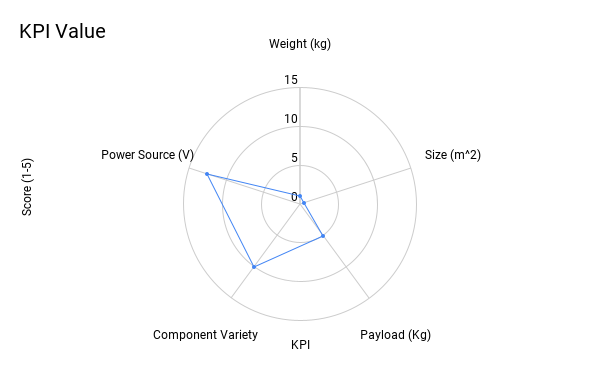
Key Performance Indicators Dashboard

KPI Values and Benchmarks
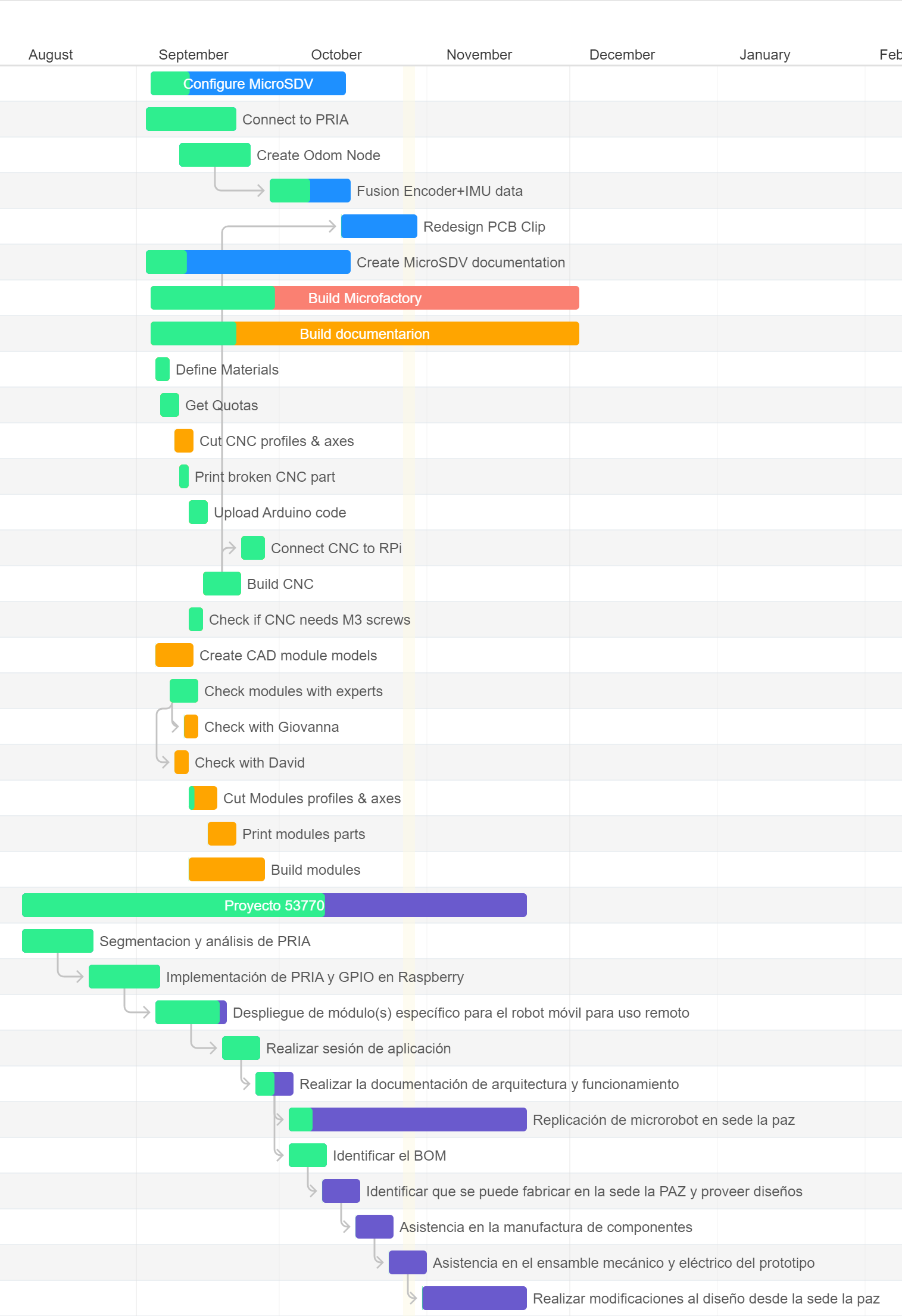
Project Timeline and Gantt Chart
Schematics
