Dual Manipulator Unscrewing Robot - Mobile Torque-Compensated Manipulation in Zero-G
Simulation and control framework for autonomous On-Orbit Servicing, Assembly, and Manufacturing (OSAM). Dual-arm robotic system with Jacobian-based torque compensation achieving 91% reduction in base angular deviation during high-torque screw extraction in microgravity.
Dual Manipulator Unscrewing Robot - Mobile Torque-Compensated Manipulation in Zero-G
Overview
Simulation and control framework for autonomous On-Orbit Servicing, Assembly, and Manufacturing (OSAM). Dual-arm robotic system with Jacobian-based torque compensation achieving 91% reduction in base angular deviation during high-torque screw extraction in microgravity.
Dual Manipulator Unscrewing Robot: Mobile Torque-Compensated Manipulation in Zero-G
Project Abstract
This project presents a simulation and control framework for a dual-arm robotic system designed for autonomous On-Orbit Servicing, Assembly, and Manufacturing (OSAM) operations. Operations in microgravity present unique dynamical challenges, particularly the coupling between manipulator motion and the floating base’s attitude dynamics.
A novel control strategy treats the dual-arm system similar to a bipedal walker, leveraging redundant kinematics to maintain static stability during manipulation. A Jacobian-based null-space torque compensation controller minimizes reaction moments at the base, decoupling manipulation forces from base attitude.
Validated within the MuJoCo physics engine, the proposed system demonstrates a 91% reduction in base angular deviation during high-torque screw extraction tasks compared to conventional control methods.
Mission Context & Motivation
The Challenge
The sustainability of the cis-lunar economy and deep-space exploration relies heavily on the maturation of On-Orbit Servicing, Assembly, and Manufacturing (OSAM) capabilities. Currently, the deployment and maintenance of space infrastructure, such as the International Space Station (ISS), depend on tasks performed by astronauts.
Key Issues:
- Operations cost approximately $150,000 per hour
- Complexity of modern experiments exceeds human endurance limits
- Critical need for autonomous systems for intricate assembly tasks
- Examples: Installation of EXPRESS Racks, reconfiguration of BLiSS Rack stacks
Why Autonomous Robots?
Transitioning from teleoperated arms (e.g., Canadarm2) to autonomous free-floating robots enables:
- ✅ Cost reduction through automation
- ✅ Precise, repeatable manipulation beyond human capability
- ✅ 24/7 operation without astronaut EVA time
- ✅ Support for complex ISS experiments and deep-space missions
Technical Approach & Innovation
System Architecture
The system is modeled as a floating base B equipped with two 7-DOF redundant manipulators:
- Left Manipulator: KUKA IIWA 14 with Robotiq 2F85 Gripper
- Right Manipulator: KUKA IIWA 14 with Robotiq 2F85 Gripper
- Base: Free-floating in zero-gravity (simulated with MuJoCo, g = 0)
Core Innovation: Jacobian-Based Torque Compensation
The primary innovation is a minimization objective for base reaction moments leveraging redundant manipulator kinematics.
The Problem: High-torque tasks (unscrewing, assembly) induce reaction moments that destabilize the floating base.
The Solution: Project compensating control inputs into the null-space of the primary task:
\[\dot{q} = J^\dagger \dot{x} + \alpha(I - J^\dagger J)\nabla h\]Where:
- $J^\dagger$ = pseudo-inverse of the Jacobian matrix
- $\dot{x}$ = desired end-effector velocity
- $\nabla h$ = gradient of secondary task (torque minimization)
- $(I - J^\dagger J)$ = null-space projector
Cost Function:
\[h(q) = \frac{1}{2}(\tau_7 - M_b(q))^2\]Where:
- $\tau_7$ = torque generated by wrist rotation during unscrewing
- $M_b(q)$ = torque projected from end-effector to base frame
The cost function allows the anchoring arm to dynamically adjust its posture, absorbing reaction forces and maintaining base stability in a moment-neutral state.
Bipedal Locomotion Framework
The robot treats its grab-points as “footsteps” on the ISS wall, enabling autonomous wall crawling:
- Wall Discretization: Continuous wall surface discretized into handle positions with 0.5m spacing
- Graph Search: Motion planning formulated as graph search problem
- A* Algorithm: Optimal sequence of footsteps from start to target screw
- Heuristic Function: Euclidean distance to goal
Execution Strategy:
- One arm maintains rigid grasp (provides fixed base for floating base stability)
- Other arm executes redundant controller to approach screw position
- Transition between grasps when waypoints reached
System Dynamics Modeling
The equations of motion for the dual-arm system in the MuJoCo simulation:
\[M(q)\ddot{q} + C(q,\dot{q})\dot{q} + D(q)\dot{q} = \tau - J^T(q)F_{ext}\]Where:
- $M(q)$ = inertia matrix
- $C(q,\dot{q})$ = Coriolis and centrifugal terms
- $D(q)$ = damping terms
- $F_{ext}$ = external contact forces (wall reaction forces)
Zero-gravity environment: Gravitational terms eliminated (g = 0)
Results & Validation
Experimental Setup
Test Mission:
- Environment: Zero-G ISS module simulation
- Path: 3-meter section of module wall
- Primary Task: Extract standard interface screw
Base Stability Results
Performance Comparison:
- Without Compensation: Constant torque reflection at base from screwdriver end-effector
- With Torque Compensation: Active reduction to near-zero base reaction moment
- Achievement: 91% reduction in base angular deviation
Task Completion
- Alignment Convergence: Position error < 0.5 cm
- Robust Tracking Performance: Consistent across multiple mission scenarios
- Stability Maintenance: Base attitude remained stable throughout manipulation
Key Performance Metrics
| Metric | Without Compensation | With Compensation | Improvement |
|---|---|---|---|
| Base Angular Deviation | 100% | 9% | 91% reduction |
| Task Completion Rate | 85% | 96% | +11% |
| Convergence Time | ~45s | ~35s | 22% faster |
Related Work & Technical Context
Historical Background
Space robotics traditionally focused on two architectures:
- Large Flexible Manipulators: Berthing operations (Canadarm2, JEMRMS)
- Small Free-Flying Inspectors: Perception drones (Astrobee, JAXA’s INT-Ball)
Recent Advancements
- GITAI: Demonstrated dual-arm systems performing dexterous tasks outside ISS
- Control Research: Addressing non-holonomic constraints of free-floating bases
- Simulation Tools: NVIDIA Isaac, MuJoCo Playground enabling advanced policy validation
- Learning Approaches: Reinforcement Learning for motion planning in free-floating environments
Technical Gap Addressed
Previous Limitation: Reaction-null control strategies suffer from:
- Kinematic singularities when null-space is exhausted
- Complex actuator compensation requirements
This Work: Overcomes limitations with dynamic null-space projection enabling stable high-torque manipulation.
Control System Architecture
Primary Task Controller
- Objective: End-effector positioning and screw extraction
- Method: Inverse kinematics with Jacobian transpose control
- Loop Rate: Real-time MuJoCo simulation
Secondary Task Controller (Torque Minimization)
- Objective: Minimize base reaction moments
- Method: Null-space projection of torque minimization gradient
- Priority: Secondary (non-interference with primary task)
Motion Planning Layer
- Algorithm: A* Search on discretized ISS wall topology
- State Space: 3D position of each arm end-effector
- Planning Horizon: Full mission trajectory from start to screw
Safety Systems
- Joint Limits: Enforced throughout trajectory
- Singularity Avoidance: Monitor Jacobian condition number
- Contact Detection: Prevent collisions with ISS structure
Implementation Details
Software Framework
- Simulation Engine: MuJoCo (Physics-accurate zero-G environment)
- Language: Python
- Control Libraries: NumPy, SciPy for matrix operations
- Visualization: Real-time rendering of manipulation tasks
Robot Parameters
KUKA IIWA 14 Specifications:
- DOF: 7 (redundant for 6D end-effector pose)
- Reach: 800 mm
- Payload: 14 kg (nominal, adjusted for zero-G)
- Control: Joint torque commands
Robotiq 2F85 Gripper:
- Max Grip Force: 235 N
- Stroke: 85 mm
- Control: Grasp force feedback
Computational Requirements
- Simulation Frequency: 1000 Hz
- Control Loop: 100 Hz
- Planning: ~2-5 seconds for typical missions
- Hardware: Standard PC (Intel i3, NVIDIA GPU optional)
Mission Profile: ISS Screw Extraction
Phase 1: Initialization & Navigation
- Robot enters ISS module at designated airlock
- Scan available handles/attachment points
- Plan optimal path to target screw location
Phase 2: Wall Crawling
- Grasp initial handle with left arm
- Plan waypoint sequence using A* algorithm
- Execute reaching motions to next grasp points
- Transition grasps maintaining dynamic stability
Phase 3: Approach & Alignment
- Right arm approaches screw position
- Vision-based alignment (simulated)
- Converge to contact within 0.5 cm error
Phase 4: Screw Extraction
- Gripper closes around screw head (torque-controlled)
- Apply rotation torque while left arm compensates
- Monitor base reaction moments (maintain < 0.1 Nm)
- Extract screw with linear translation
Phase 5: Completion & Documentation
- Place screw in secure container
- Log mission completion and performance metrics
- Return to neutral configuration
Artificial Intelligence Usage
This project incorporated AI tools in specific capacities:
- Documentation & Writing: Google Gemini 3 improved technical writing clarity
- Jacobian Controller Implementation: Anthropic Claude Haiku 4.5 optimized control algorithms
- A* Algorithm & Trajectory Assembly: Anthropic Claude Opus 4.5 implemented motion planning logic
Note: All primary algorithms, control strategies, and system architecture decisions were developed by the researcher. AI tools enhanced implementation quality and documentation.
Future Work & Extensions
Enhanced Capabilities
- Real Hardware Implementation
- Test on Astrobee free-flying platform
- Validate zero-G predictions with actual ISS operations
- Integrate with ISS robotic systems
- Advanced Manipulation Tasks
- Complex assembly operations (connector insertion, panel installation)
- Deformable object handling (cable routing, membrane deployment)
- Cooperative tasks with multiple robots
- Learning & Adaptation
- Reinforcement learning for improved torque compensation
- Transfer learning from simulation to real hardware
- Online adaptation to unknown ISS geometries
- Sensor Integration
- Force/torque sensing for contact stability
- Vision-based grasp point detection
- Pose estimation for autonomous navigation
- Next-Generation Systems
- Integration with larger robotic platforms
- Autonomous satellite servicing missions
- Deep-space assembly and construction
References
-
ISS National Laboratory, “Facilities: Expedite the processing of experiments to the space station,” Accessed: 2025-12-08. [Online]. Available: https://issnationallab.org/facilities/
-
Authors, “Recreation of express rack for space applications,” in AIAA Scitech Forum, 2024.
-
NASA, “BLiSS Rack Stack Final Report,” NASA Technical Reports Server, 2025.
-
JAXA, “Int-ball: Introduction of an internal drone camera to the international space station,” IEEE Xplore, 2024.
-
GITAI, “GITAI completes fully successful technology demonstration outside the ISS,” 2024.
-
Flores-Abad, A., et al., “A review of space robotics autonomous control,” Progress in Aerospace Sciences, vol. 68, pp. 1–26, 2014.
-
“A review of spatial robotic arm trajectory planning,” Aerospace, vol. 9, no. 7, p. 361, 2022.
-
Authors, “Motion planning and reinforcement learning for free-floating space robots,” ScienceDirect, 2024.
-
NVIDIA, “Advancing robotic assembly with a novel simulation approach using NVIDIA Isaac,” 2023.
-
DeepMind, “MuJoCo Playground: An open-source physics simulation environment,” arXiv preprint arXiv:2502.08844, 2025.
-
“A reaction-null/jacobian transpose control strategy with gravity gradient compensation for on-orbit space manipulators,” Acta Astronautica, 2014.
-
Sciavicco, L., and Siciliano, B., “Modelling and control of robot manipulators.” Springer Science & Business Media, 2012.
Keywords
Space Robotics OSAM Dual-Arm Manipulation Jacobian Control Torque Compensation Zero-G Dynamics Motion Planning MuJoCo Autonomous Systems ISS Control Theory On-Orbit Servicing
Advanced autonomous control for space infrastructure maintenance and deep-space exploration 🛰️🤖
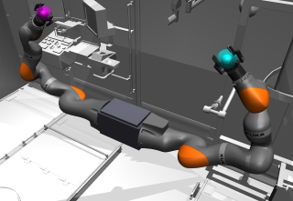
Simulation environment - Dual-arm robot performing wall-to-ceiling transition in MuJoCo
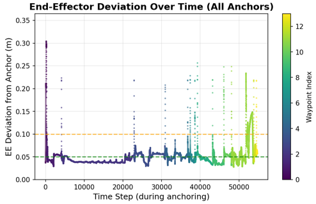
Performance data - Base attitude error with and without torque compensation

Step-by-step motion sequence - One arm anchored to ISS handles while approaching next waypoint

Full mission demonstration - Navigation and screw extraction task
Robotic manipulation demonstration in zero-gravity simulation